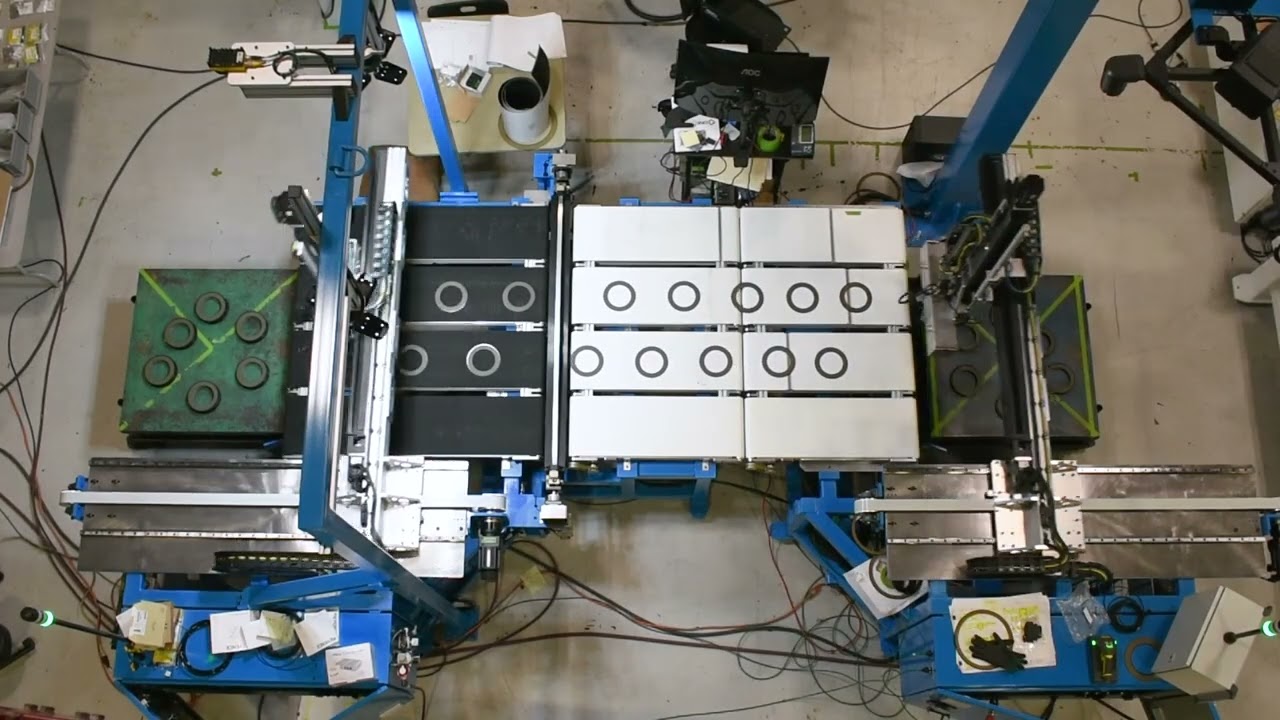
3D Bin Picking System
A leading global provider of high performance brake and friction solutions was searching for a better way to load and unload heavy parts. This system also needed to have the ability to accommodate various sizes of heavy parts and have part marking capabilities.
Technology Used
SDC servo-driven three axis cartesian robot
Four self-adjusting magnetic part grippers
Keyence 3D vision guided bin picking system
Allen Bradley PLC based electrical control system
Custom vision guided part picking software
Infeed and outfeed belt conveyors
Servo-driven rotary part flipping mechanism with pneumatic gripper